Barnard, K., Daniels, J., Roberts, P. L. D., Orenstein, E. C., Masmitja, I., Takahashi, J., Woodward, B., & Katija, K. (2024). DeepSTARia: Enabling autonomous, targeted observations of ocean life in the deep sea. Frontiers in Marine Science, 11, 1357879. https://doi.org/10.3389/fmars.2024.1357879
While it is known that the ocean is home to a plethora of life, it is largely unexplored and can be extremely difficult to reach. Given that the underwater life that has been explored offers several essential ecological, cultural, and economic benefits, discovering more of what goes on under the sea and how it is changing over time could be crucial to maintaining a healthy planet.
Beyond Human Abilities
Currently, deep sea exploration relies greatly on small-scale human monitoring. Such efforts are well established but too time- and cost-intensive to keep up with the rapidly changing planet. Instead, researchers have developed a program to control autonomous underwater vehicles (AUVs) that allows them to change their behavior and sampling methods in real-time based on biological and environmental conditions.
Underwater observation takes many forms. In the past, the primary non-extractive observation method was imaging using cameras and other devices. When combined with underwater vehicles, the imaging method can be used to access many parts of the ocean that human divers cannot.
In this context, AUVs are often employed in transects, meaning their behavior remains constant throughout a location. After sending AUVs out, the data they collect is used to identify species and environmental characteristics. However, this method can overlook important details of the environment.
Recent developments in technology have led to preliminary efforts to make AUV technologies more adaptive and comprehensive. Improving these technologies opens doors for more cost efficient, large scale, and accurate marine exploration.
DeepSTARia
In this study, researchers programmed a new set of algorithms that enables the aforementioned improvements: Deep Search and Tracking Autonomously with Robotics, or DeepSTARia. DeepSTARia expands on the baseline method of using sensors to locate and track animals and then following them consistently for long periods of time. In addition to this, DeepSTARia utilizes object detection, stereo tracking, vehicle controller, and Supervisor model (searching, acquiring, and tracking objects on repeat) to discover the features of the deep sea more rapidly and in more accurate detail.
How Does it Work?
Researchers employed a remotely operated vehicle (ROV) in the Monterey Bay National Marine Sanctuary in California to test the effectiveness of the DeepSTARia algorithm. The ROV, tracked by humans, was updated based on the local conditions in real time while underwater. DeepSTARia combined object detection, previous tracking information, and stereo systems to determine the location of an object in space.
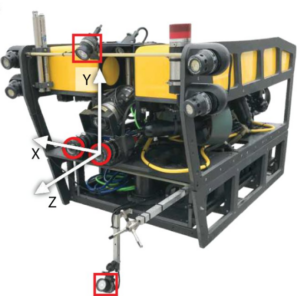
Figure 1. The ROV used to test the DeepSTARia algorithm.
The algorithm focused on first continuously searching for an object. Once detected, it switched to acquire mode, in which the ROV slowed and used its camera to center the object. Here, it waited for the object to move into closer range, upon which it switched to track mode. In track mode, the ROV tried to maintain a constant distance from the object. It stayed in track mode until the target object either moved in acquire range, the object moved to search range, the ROV was commanded to return to search mode, or the tracking occurred for longer than the pre-programmed time (15 seconds to 15 minutes, depending on the particular objective of the mission).
DeepSTARia employed three types of missions:
-
- Transect: Remaining in search mode throughout the mission
- Discovery: Stopping each time it found a target for a certain amount of time, then returning to search
- Follow: Remaining in track mode for a certain amount of time after spotting a target animal
Does it Work?
The results of the study revealed that the DeepSTARia algorithm did expand the range of observations attainable by underwater vehicles. In particular, the Discovery missions captured 2.5 times as many images of target objects than Transects. The Follow missions also proved to be more promising than Transects. Additionally, the quality of the images were higher, which allowed for more accurate observation and identification of animals and their behavior.
Because the program was unique in that it could be updated by humans in real-time, it could be adapted to filter out non-interest species, a quality that might be utilized in a variety of different studies.
Why is Technology Like This Important?
As humans continue to pursue efforts of discovery, and as the planet continues to change in ways we do not yet understand, it is important that our methods and strategies of ocean exploration improve in terms of accuracy and efficiency.
The novelty of adaptive underwater technology enables research to be more fine tuned, precise, and quick. The implementation of this algorithm has the potential to benefit the fields of ecology, oceanography, and archaeology, and to do so without humans present.
Not only does this study open up the opportunity for applying this technology to research, it also paves the way for more innovative use of programming and robotics to make ocean exploration more accessible and feasible.
Cover image: Autonomous Underwater Vehicles (AUVs). Image credits: LibreTexts

I am an MPS student at the University of Miami’s Rosenstiel School of Marine, Atmospheric, and Earth Sciences pursuing a degree in Marine Biology and Ecology on the Tropical Marine Ecosystem Management Track. After graduating, I plan to use my education and experience to pursue a career in science writing or film production to help communicate the importance of the ocean to the general public.